 2024/12/13
2024/12/13一、目的
通过阅读本文指南,能够使用翌视Capture软件快速进行获取物体表面三维轮廓数据,进行轮廓测量以及点云相关智能分析等工作。
本指南主要通过下图标准棱台测试件进行轮廓点云数据采集与生成进行相关演示,供用户使用参考。

图1、测试件
二、系统连接
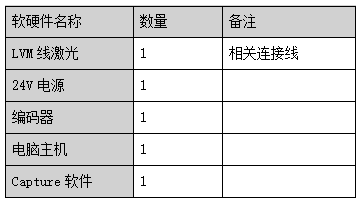
本部分需要用到的软硬件如下表所示:
表1:软硬件列表
1、硬件连接
本部分主要从相机连接、编码器连接、软件连接三个部分进行说明。
A、相机连接
确保相机已经正常上电,同时指示灯工作正常,如下所示:
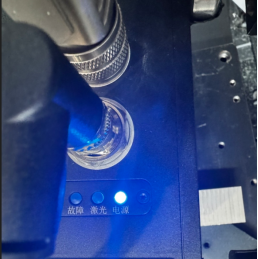
图2、相机上电
如上图所示,电源指示灯正常亮起,即相机上电成功,同时将相机一头网线连接Capture软件所在主机,并设置好主机电脑网段和相机在同一网段。
B、编码器连接
编码器的硬件连接,本部分需要了解LVM线激光每根线的具体代表含义,如下图所示:
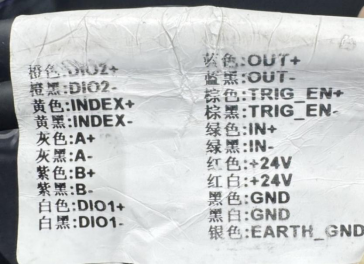
图3、LVM线激光线束含义
连接编码器需要关注的是上图中灰色(A+)、灰黑(A-)、紫色(B+)、紫黑(B-)四根线即可,对应编码器上接线如下:

图4、编码器和相机连接接线图
如上图所示,LVM线激光A/B线对应编码器上的接线如上图所示。 C、软件连接
打开Capture进行自动搜索,连接相机,如下图所示:

图5、相机搜索连接
如上图所示,按步骤1、2、3进行,如果没有搜索到相机请检测相机是否上电,网线是否正常连接;如果能搜索到双击连不上,则检测是否主机网段和相机网段设置不一样。 连接成功后,点击下图采图按钮进行实时获取激光线图,如能正常看到被测物体激光线即相机连接成功。

图6、采集按钮
三、测试步骤
1、按照章节《二、系统连接》进行软硬件连接;
2、采集参数设置
较准确的测量精度离不开较好的成像,在测量之前需要针对被测物体进行曝光等参数调整;其中通过调整参数,包括:曝光时间,增益,激光功率,曝光模式等,最终使得激光线图在被测物体上达到评分90分以上,同时不丢点等为宜。
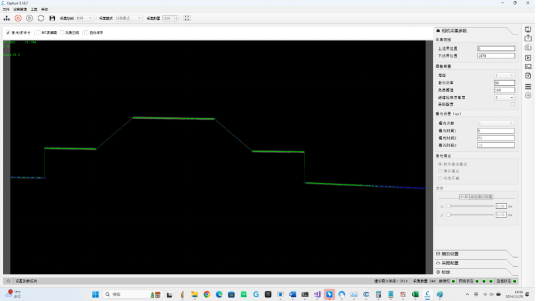
图7、参数调整
3、点云数据采集
软件相关设置如下:

图8、编码器设置
如上图所示,将从1~4分别进行说明:
<1>、采集控制选择软件、采集模式计数模式,采集数量(这个可以根据实际物体的长度先填一个初始值,如果扫描行数不够则加大即可)。
<2>、触发源选择:编码器
<3>、编码器分辨率mm:这里需要注意,这个值为编码器光栅尺实际分辨率(本文编码器分辨率为0.002mm,即每次最小可分辨的移动距离为2um),用户填入自己的编码器光栅尺分辨率即可;
<4>、触发分频比,这里的分频比即理解为编码器M个脉冲计数(移动了M个2um)则触发一次LVM线激光采一条轮廓;
<5>、触发间隔mm:自动计算 即可(这里代表的是点云中两条轮廓之间的间隔);
<6>、最大帧率 特别注意的是,触发分频比如果填入不合理则可能导致采图不完整,如下图所示:
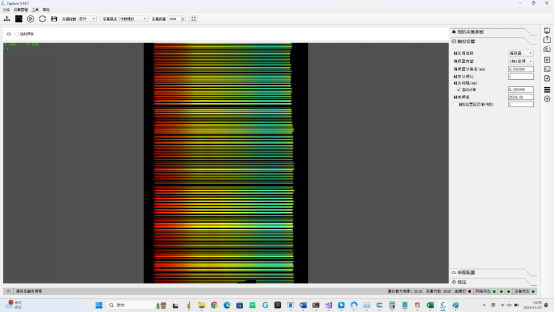
图9、部分轮廓丢失
如上图所示,此时触发分频比为1,中间黑色行即是轮廓数据丢失。我们可以通过调整编码器的移动速度、修改触发分频比或者通过缩小图像ROI提升帧频来使得数据采集完整。本指南主要如何通过修改触发分频比来实现数据采集的完整性,如下所示:
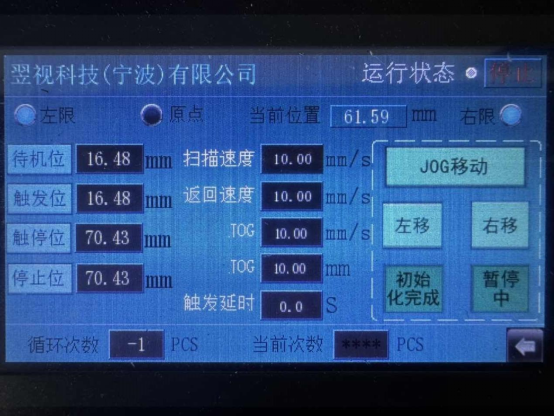
图10、编码器参数
由上图可知,编码器的移动速度为10mm/s,用S表示,编码器分辨率为0.002mm,而由图6中第6项可知,LVM线激光此设置之下最大帧频为2518Hz,用F表示;此时1s钟编码器能够触发N个脉冲:
N = S/0.002*1;即N=5000 公式-1
可知,当触发分频比为1的时候,N > F(2518),意味着LVM此时获取轮廓的速度低于触发速度,显然编码器触发太快,导致LVM线激光来不及采集轮廓以至于行数据丢失;通过上文介绍可知,触发分频比可以使得编码器触发M次脉冲触发一次LVM线激光采轮廓数据。因此,只要: F*触发分频比>N(5000)即可 触发分频比不宜设置太大,会导致采集数据轮廓过于稀疏,本文设置触发分频比为4即可完整采集物体表面轮廓数据,如下图所示:
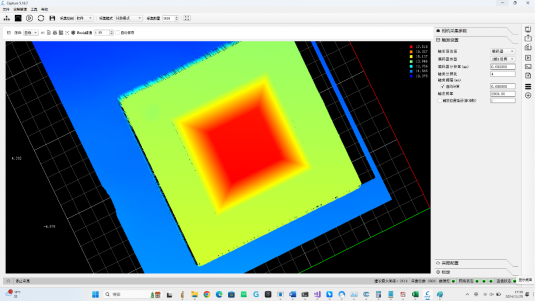
图11、物体轮廓点云数据
四、总结
上述示例,通过Capture软件可以简单快速地进行物体轮廓扫描获取三维点云数据,本技术指南详细的描叙了从LVM线激光的软硬件连接到轮廓点云数据获取。
注:为了能完整获取到物体表面轮廓数据,需要关注编码器移动速度、编码器分辨率、编码器分频比、以及最大帧率等重要信息。

